
Pre-prints
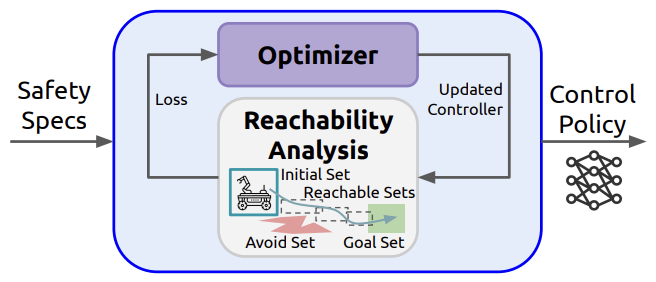
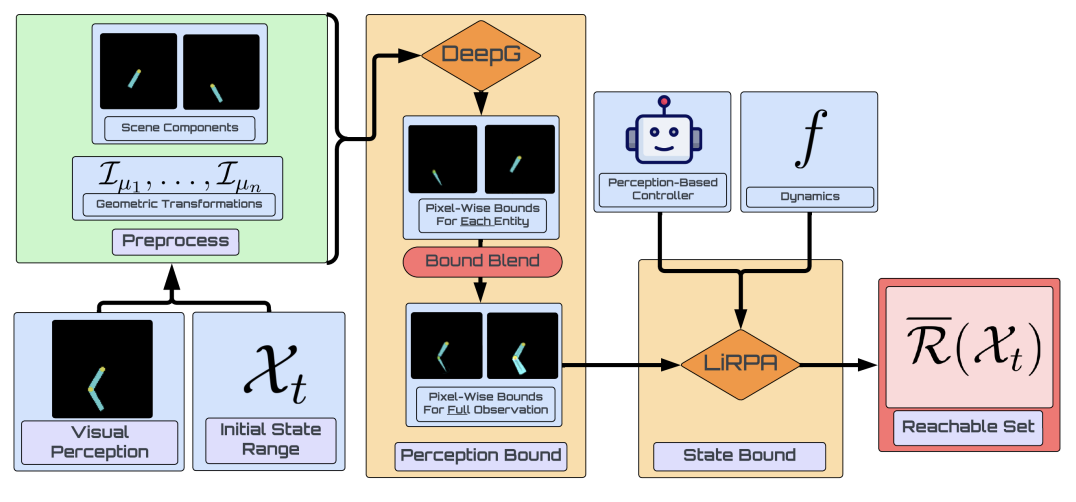 | Verification of Visual Controllers via Compositional Geometric TransformationsAlexander Estornell, Leonard Jung, Michael Everett2025 (in review)Paper |
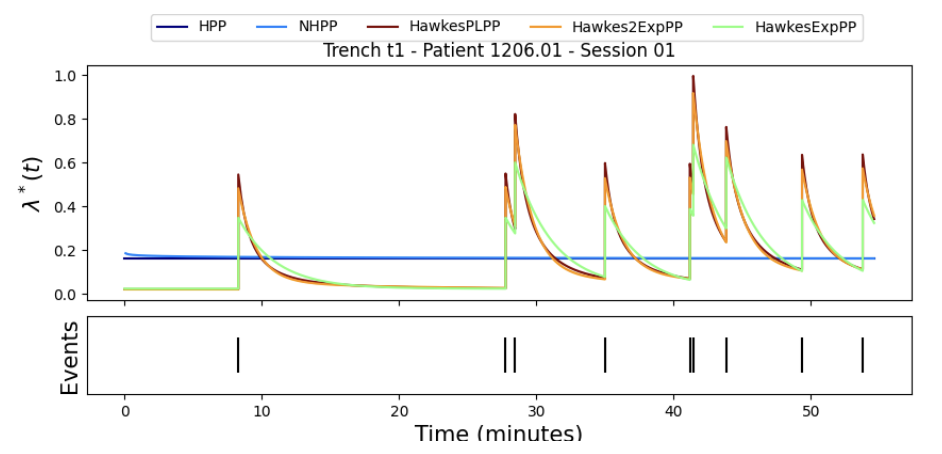 | Temporal Point Process Modeling of Aggressive Behavior Onset in Psychiatric Inpatient Youths with AutismMichael Potter, Michael Everett, Ashutosh Singh, Georgios Stratis, Yuna Watanabe, Ahmet Demirkaya, Deniz Erdogmus, Tales Imbiriba, Matthew S Goodwin2025 (in review)Paper |
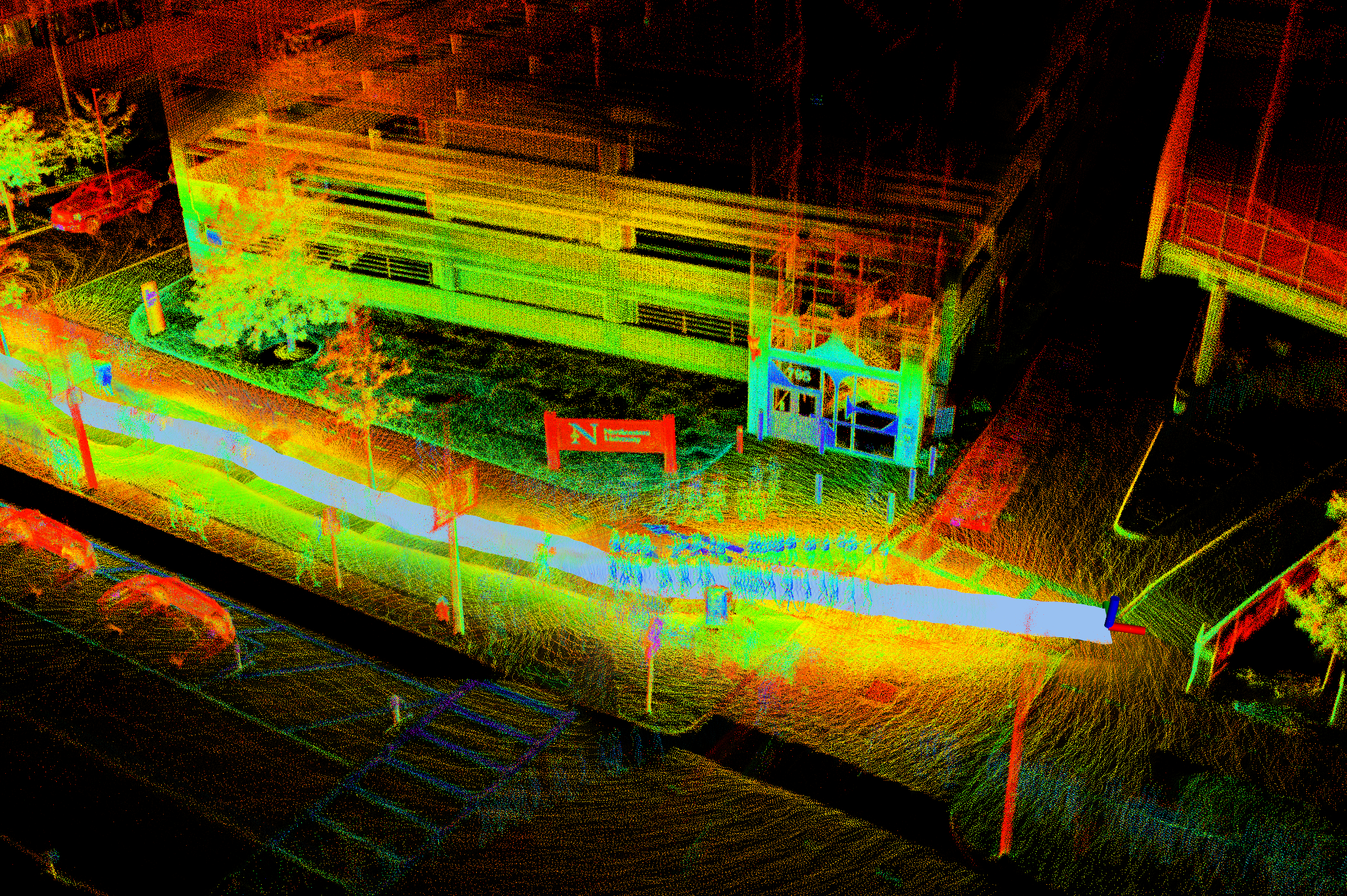
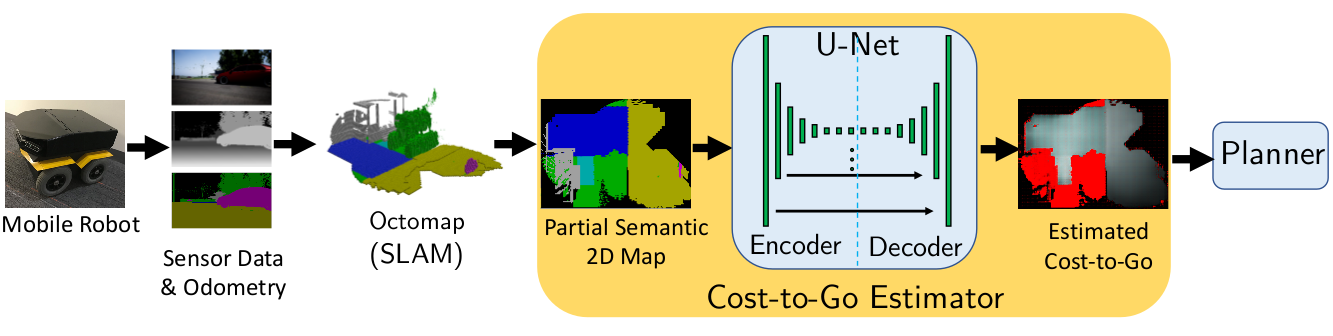
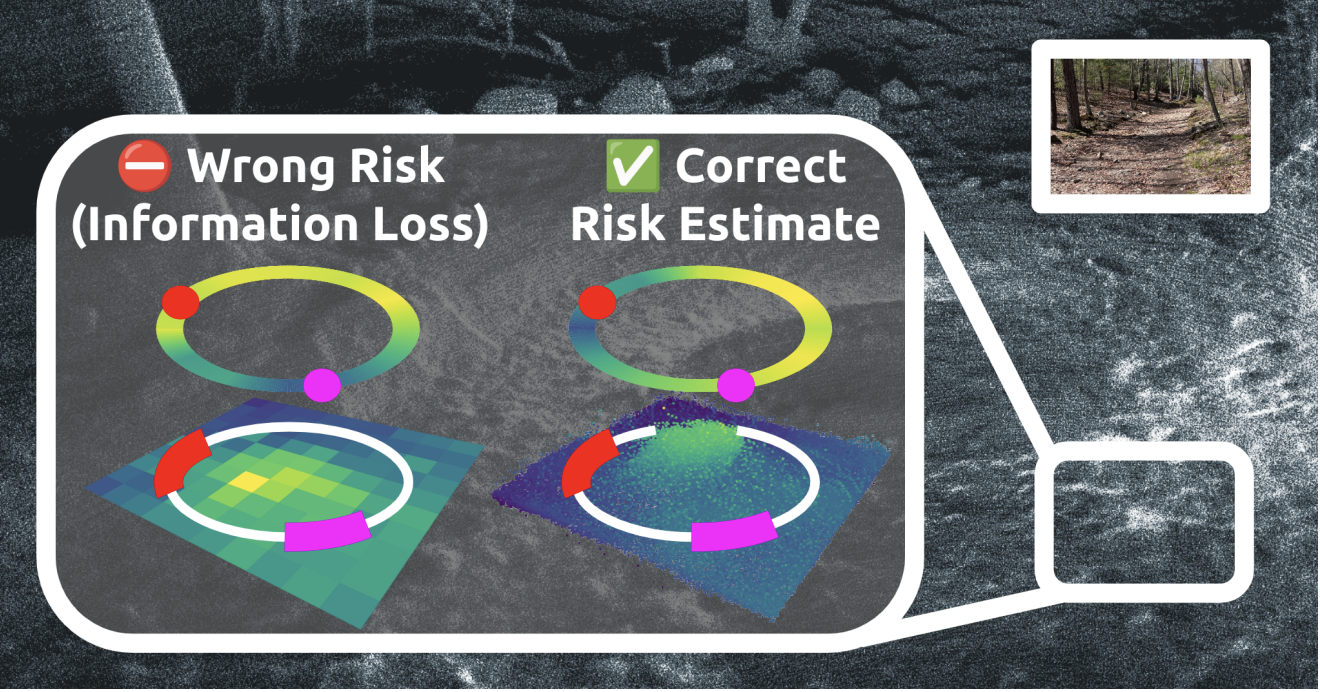 | Learning Smooth State-Dependent Traversability from Dense Point CloudsZihao Dong, Alan Papalia, Leonard Jung, Alenna Spiro, Phil Osteen, Christa Robison, Michael Everett2025 (in review)Paper |
Peer-Reviewed Publications
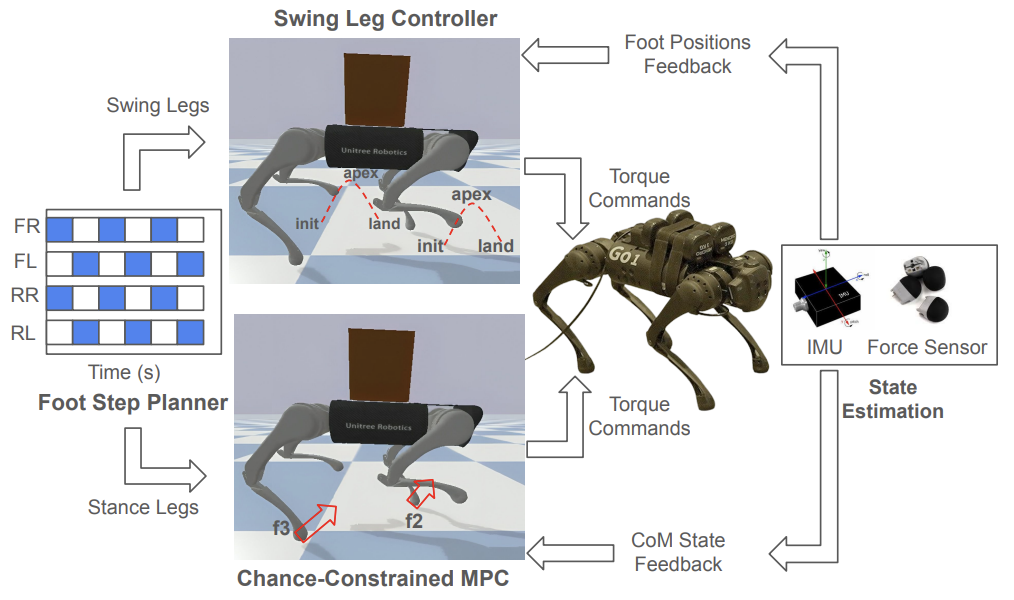 | Chance-Constrained Convex MPC for Robust Quadruped Locomotion Under Parametric and Additive UncertaintiesAnanya Trivedi, Sarvesh Prajapati, Mark Zolotas, Michael Everett, Taskin PadirIEEE Robotics and Automation Letters (RA-L), 2025Paper |
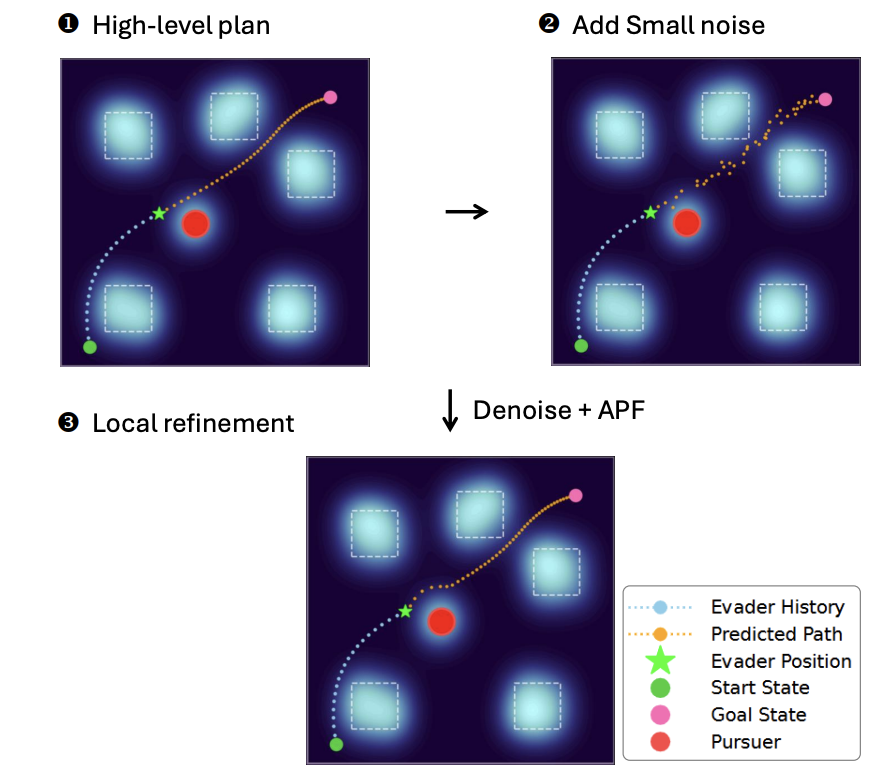 | Real-Time Adaptive Motion Planning via Point Cloud-Guided, Energy-Based Diffusion and Potential FieldsWondmgezahu Teshome, Kian Behzad, Octavia Camps, Michael Everett, Milad Siami, Mario SznaierIEEE Robotics and Automation Letters (RA-L), 2025 (accepted)Paper |
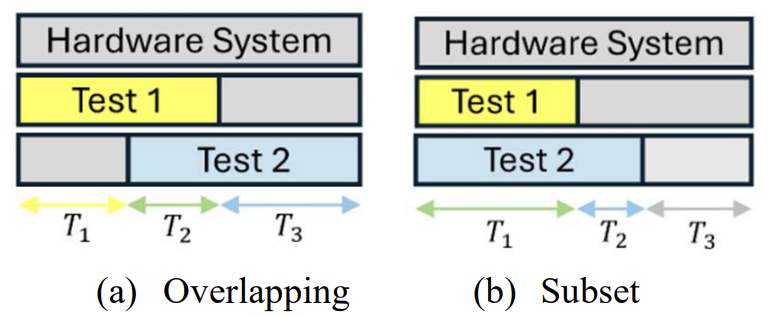 | Active Learning For Repairable Hardware Systems With Partial CoverageMichael Potter, Beyza Kalkanlı, Deniz Erdoğmuş, Michael EverettReliability, Availability, Maintainability and Safety (R.A.M.S.) - Europe, 2025 (accepted)Paper |
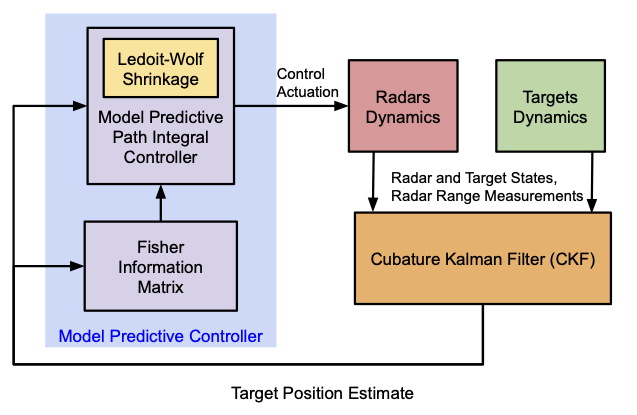 | Continuously Optimizing Radar Placement with Model Predictive Path IntegralsMichael Potter, Shuo Tang, Paul Ghanem, Milica Stojanovic, Pau Closas, Murat Akcakaya, Ben Wright, Marius Necsoiu, Deniz Erdogmus, Michael Everett, Tales ImbiribaIEEE Transactions on Aerospace and Electronic Systems (T-AES), 2025Paper Code |
 |
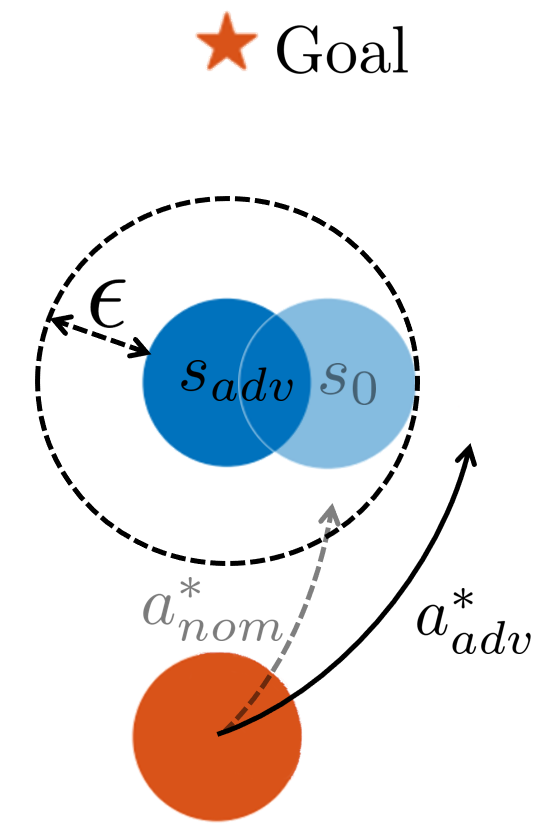
 | Adversarial Decoy Placement for Strategic State Perturbations in Artificial Intelligence Driven DefenseArmita Kazeminajafabadi, Michael Everett, Tian Lan, Nathaniel D. Bastian, Mahdi ImaniIEEE Conference on Decision and Control (CDC), 2025 (accepted) |
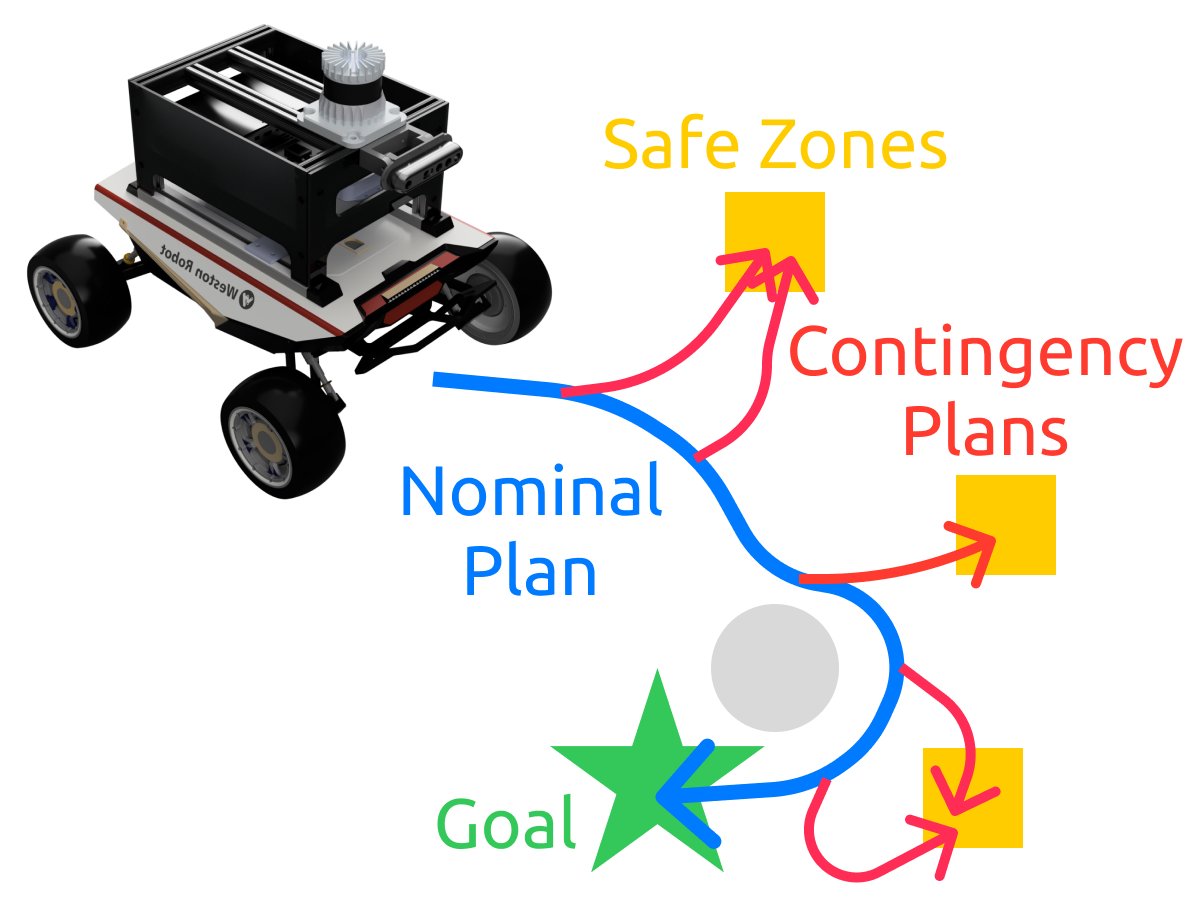 |
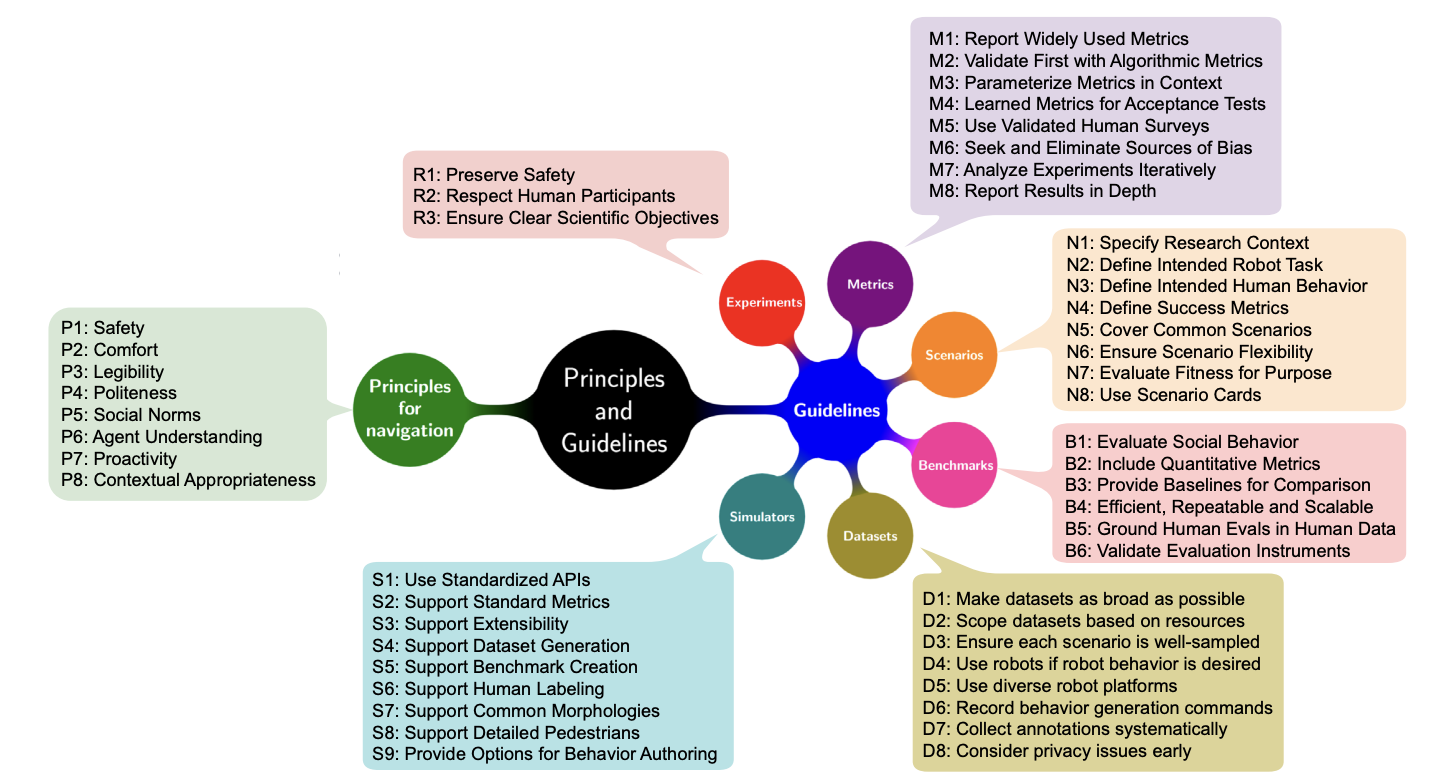 | Principles and Guidelines for Evaluating Social Robot Navigation AlgorithmsAnthony Francis, Claudia Pérez-d'Arpino, Chengshu Li, Fei Xia, Alexandre Alahi, Rachid Alami, Aniket Bera, Abhijat Biswas, Joydeep Biswas, Rohan Chandra, Hao-Tien Lewis Chiang, Michael Everett, Sehoon Ha, Justin Hart, Jonathan P How, Haresh Karnan, Tsang-Wei Edward Lee, Luis J Manso, Reuth Mirksy, Soeren Pirk, Phani Teja Singamaneni, Peter Stone, Ada V Taylor, Peter Trautman, Nathan Tsoi, Marynel Vazquez, Xuesu Xiao, Peng Xu, Naoki Yokoyama, Alexander Toshev, Roberto Martin-MartinACM Transactions on Human-Robot Interaction (T-HRI), 2025Paper Code |
 |
 |
 |
 |
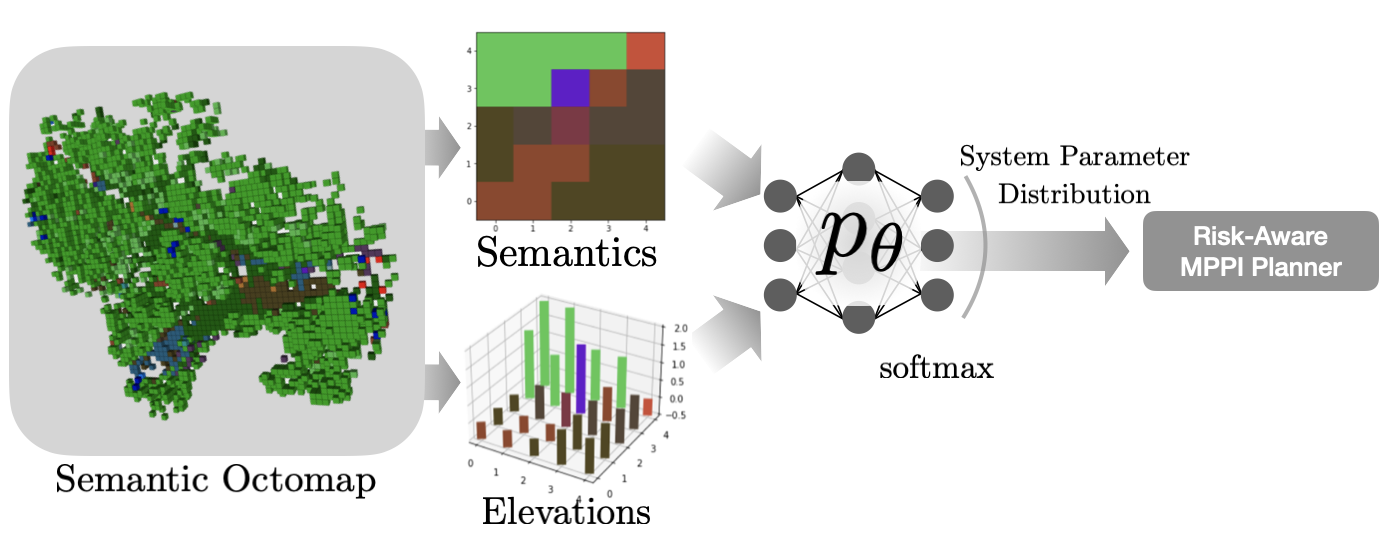
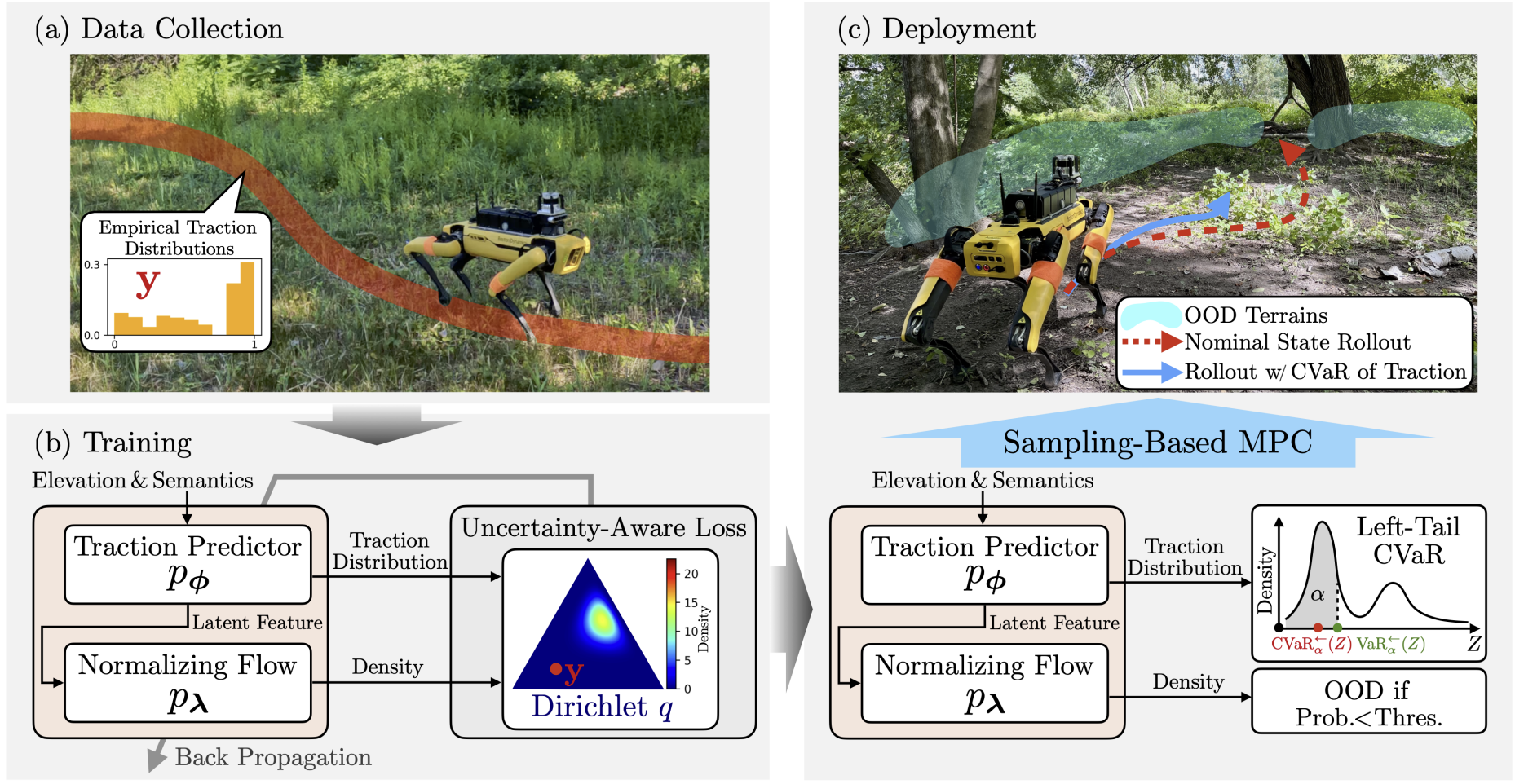 | EVORA: Deep Evidential Traversability Learning for Risk-Aware Off-Road AutonomyXiaoyi Cai, Siddharth Ancha, Lakshay Sharma, Philip R. Osteen, Bernadette Bucher, Stephen Phillips, Jiuguang Wang, Michael Everett, Nicholas Roy, Jonathan P. HowIEEE Transactions on Robotics (TRO), 2024Paper Code Video |
 |
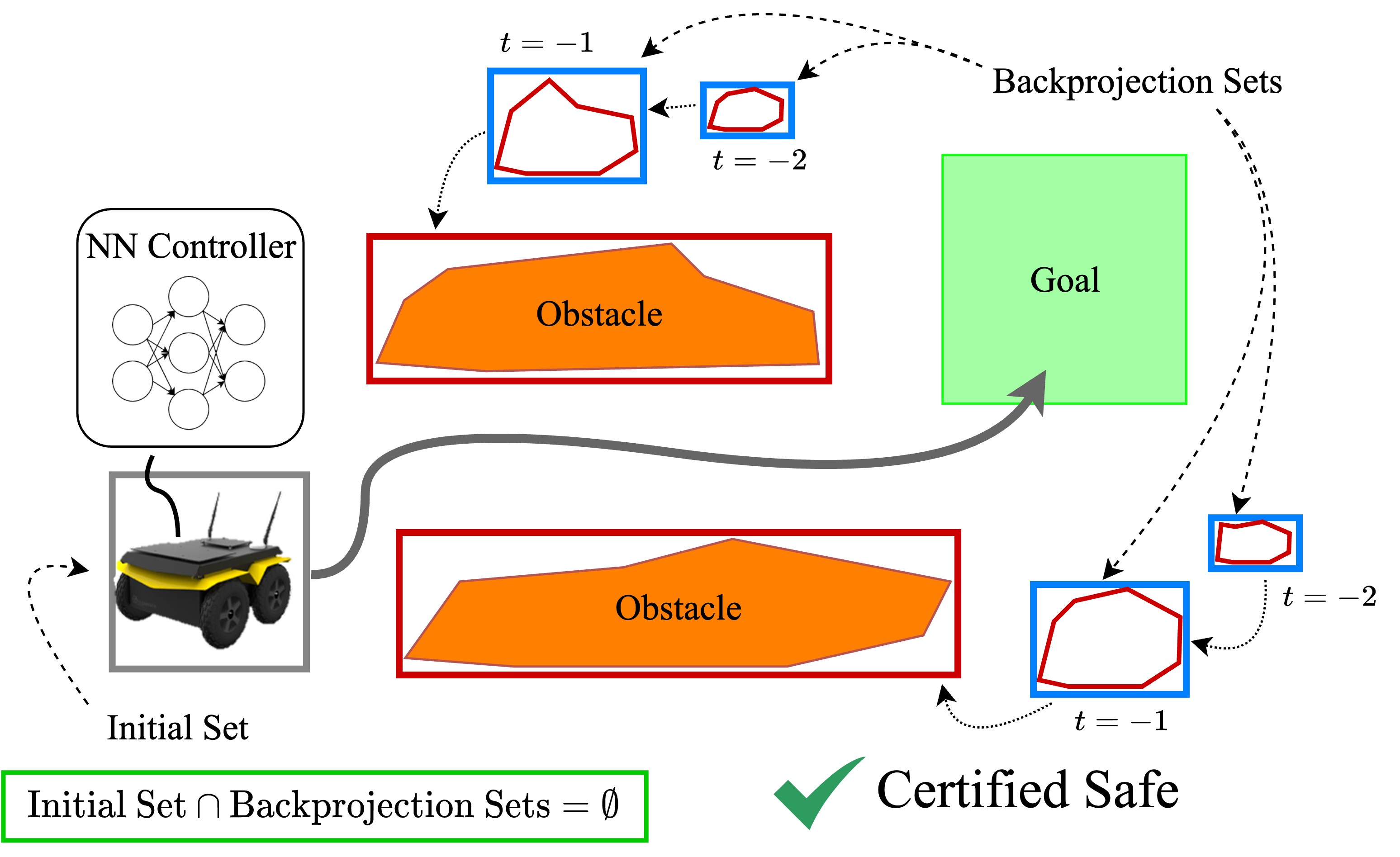 |
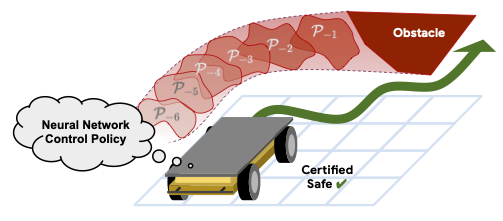
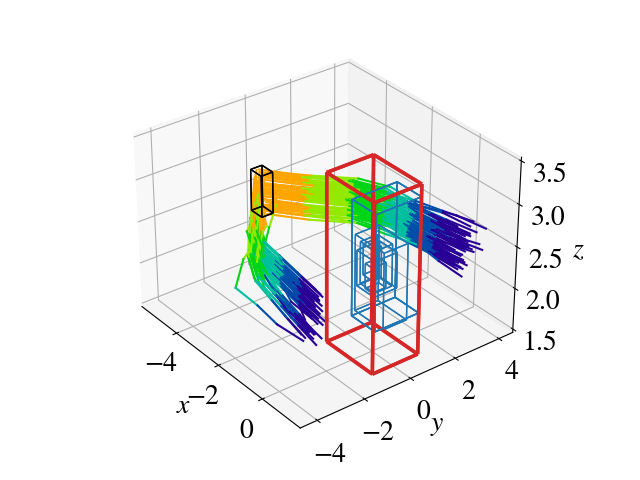 | Backward Reachability Analysis of Neural Feedback Loops: Techniques for Linear and Nonlinear SystemsNicholas Rober, Sydney M. Katz, Chelsea Sidrane, Esen Yel, Michael Everett, Mykel J. Kochenderfer, Jonathan P. HowIEEE Open Journal of Control Systems (OJ-CSYS): Special Section: Formal Verification and Synthesis of Cyber-Physical Systems, 2023Paper Code |
 |
 |
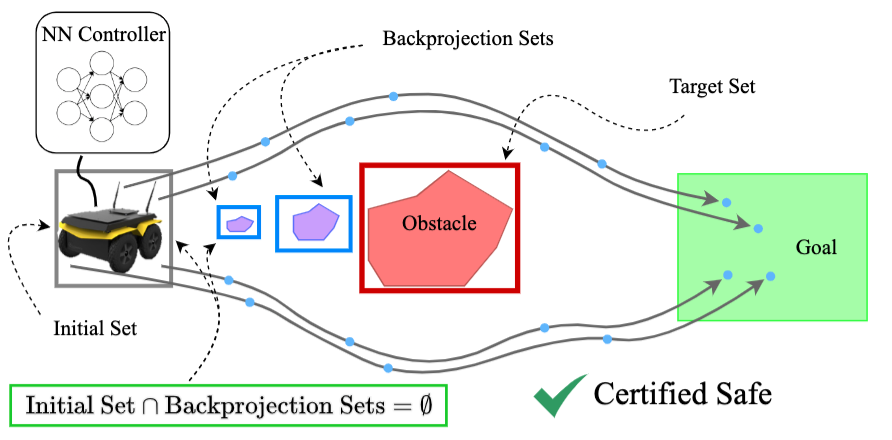 | Backward Reachability Analysis of Neural Feedback LoopsNicholas Rober, Michael Everett, Jonathan P. HowIEEE Conference on Decision and Control (CDC), 2022Also presented in 1st Workshop on Formal Verification of Machine Learning, ICML 2022.Runner-Up: Best Paper Award (WFVML 2022)IEEE TC on Aerospace Control: Best Student Paper AwardPaper Code |
 | Certifiable Robustness to Adversarial State Uncertainty in Deep Reinforcement LearningMichael Everett*, Björn Lütjens*, Jonathan P. HowIEEE Transactions on Neural Networks and Learning Systems (TNNLS), 2022Paper |
 |
 |
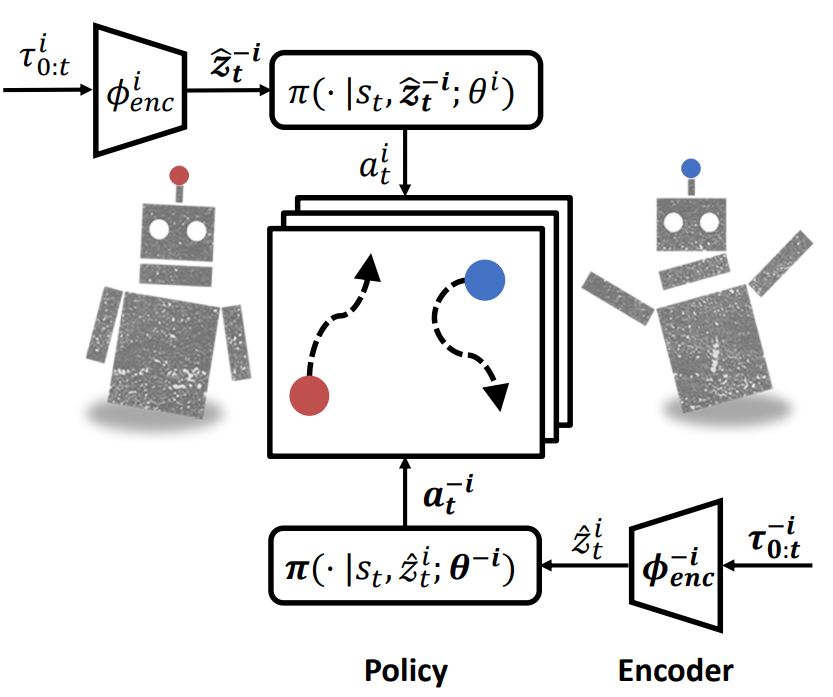 | Influencing Long-Term Behavior in Multiagent Reinforcement LearningDong-Ki Kim, Matthew Riemer, Miao Liu, Jakob N. Foerster, Michael Everett, Chuangchuang Sun, Gerald Tesauro, Jonathan P. HowConference on Neural Information Processing Systems (NeurIPS), 2022Also presented in ICLR Workshop on Gamification and Multiagent Solutions, 2022Paper Code |
 |
 | Robustness Analysis of Neural Networks via Efficient Partitioning with Applications in Control SystemsMichael Everett, Golnaz Habibi, Jonathan P. HowIEEE Control Systems Letters (L-CSS), 2021Also presented in American Controls Conference (ACC) Invited Session on Learning, Optimization, and Control for Safety-critical Systems, May, 2021.Paper Code Video |
 |
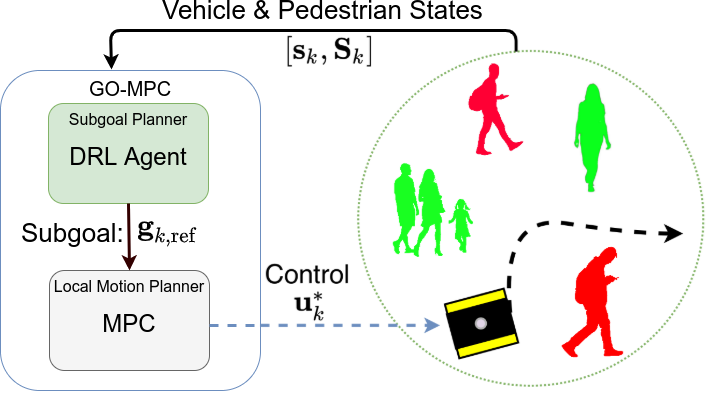
 | Collision Avoidance in Pedestrian-Rich Environments with Deep Reinforcement LearningMichael Everett, Yu Fan Chen, Jonathan P. HowIEEE Access: Special Section on Real-Time Machine Learning Applications in Mobile Robotics, 2021Editors' Top 5 Published Article Selections for 2021Featured Article of the Week (March 2021)Paper Code: [ Pre-Trained ROS Package , Training Environment , RL Training Code ] |
 |
 |
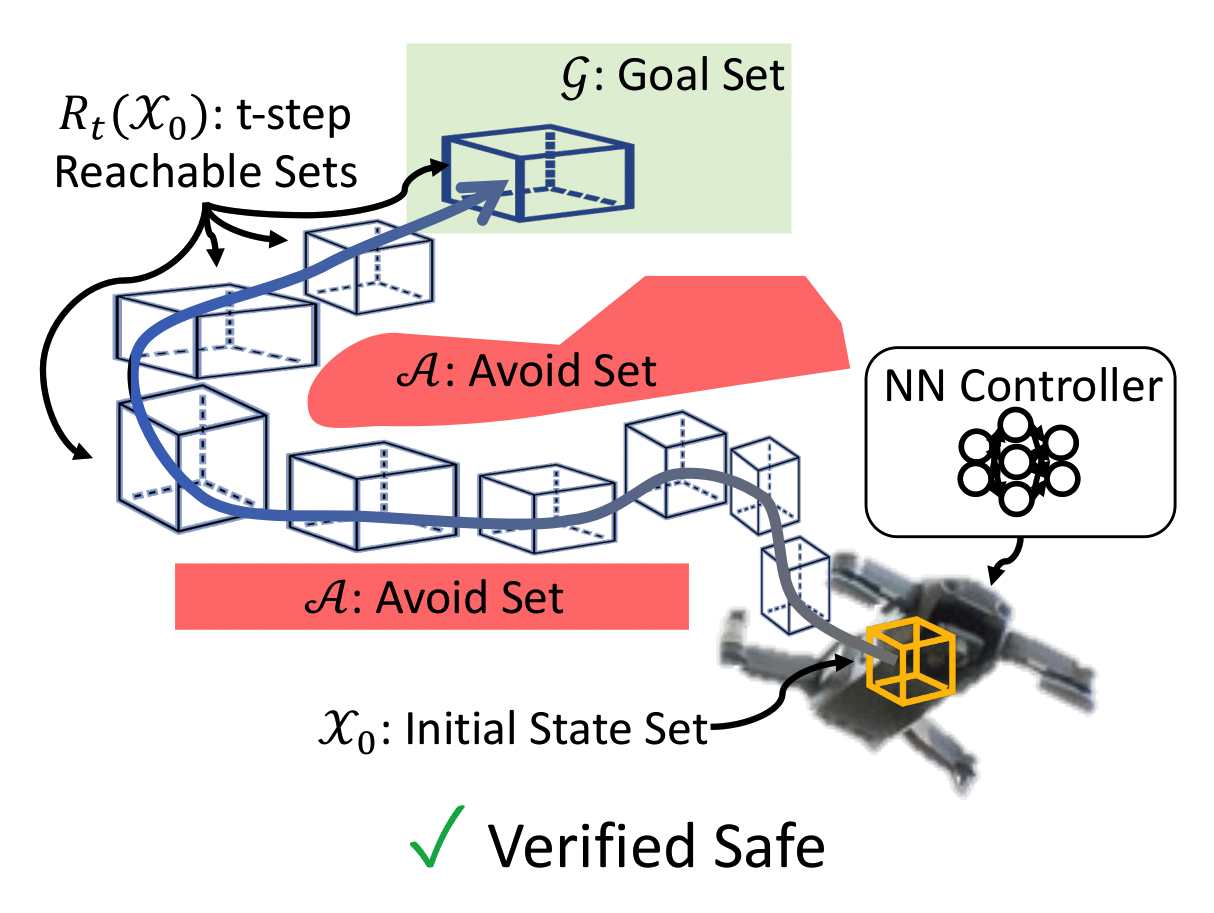 | Efficient Reachability Analysis for Closed-Loop Systems with Neural Network ControllersMichael Everett, Golnaz Habibi, Jonathan P. HowIEEE International Conference on Robotics and Automation (ICRA), 2021Also presented in International Conference on Learning Representations (ICLR) Workshop on Robust and Reliable Machine Learning in the Real World, May, 2021.Paper Code Video |
 | Multi-Agent Motion Planning for Dense and Dynamic Environments via Deep Reinforcement LearningSamaneh Hosseini Semnani, Hugh Liu, Michael Everett, Anton de Ruiter, Jonathan P HowIEEE Robotics and Automation Letters (RA-L), 2020Paper |
 |
 |
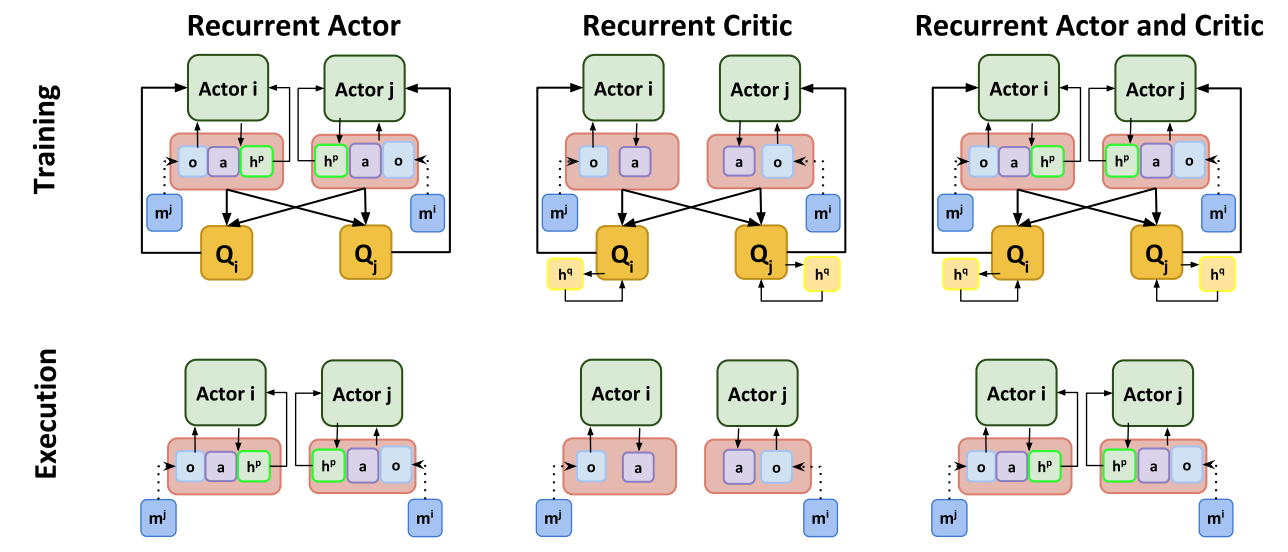 | R-MADDPG for Partially Observable Environments and Limited CommunicationRose E Wang, Michael Everett, Jonathan P. HowICML Workshop: Reinforcement Learning for Real Life, 2019Code |
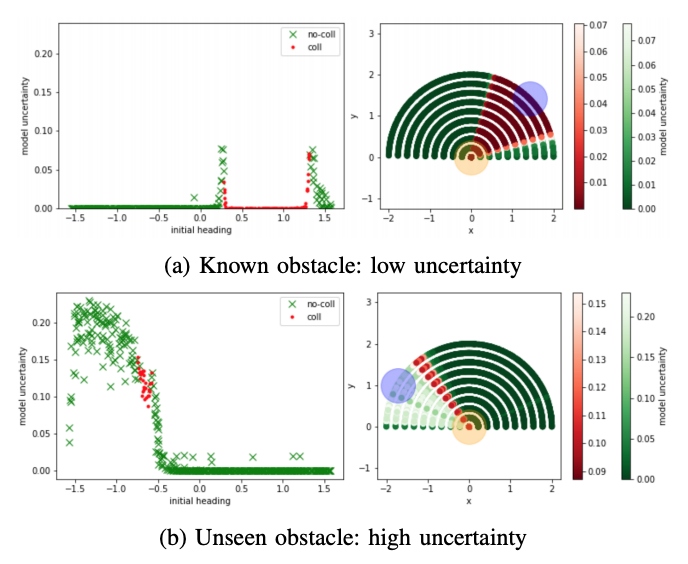 | Safe Reinforcement Learning with Model Uncertainty EstimatesBjörn Lütjens, Michael Everett, Jonathan P. HowIEEE International Conference on Robotics and Automation (ICRA), 2019Paper |
 |
 |
 | Semantic-level decentralized multi-robot decision-making using probabilistic macro-observationsShayegan Omidshafiei, Shih-Yuan Liu, Michael Everett, Brett T Lopez, Christopher Amato, Miao Liu, Jonathan P How, John VianIEEE International Conference on Robotics and Automation (ICRA), 2017Paper Video |
 | Scalable accelerated decentralized multi-robot policy search in continuous observation spacesShayegan Omidshafiei, Christopher Amato, Miao Liu, Michael Everett, Jonathan P How, John VianIEEE International Conference on Robotics and Automation (ICRA), 2017Paper |
 |
Theses
 | Algorithms for Robust Autonomous Navigation in Human EnvironmentsMichael EverettPhD Thesis, 2020MIT Department of Mechanical EngineeringVideo |
 | Robot Designed for Socially Acceptable NavigationMichael EverettSM Thesis, 2017MIT Department of Mechanical Engineering |