Open-Source Software
For the latest software from my research group, please visit our GitHub page.
For older software I developed with collaborators, please see below:
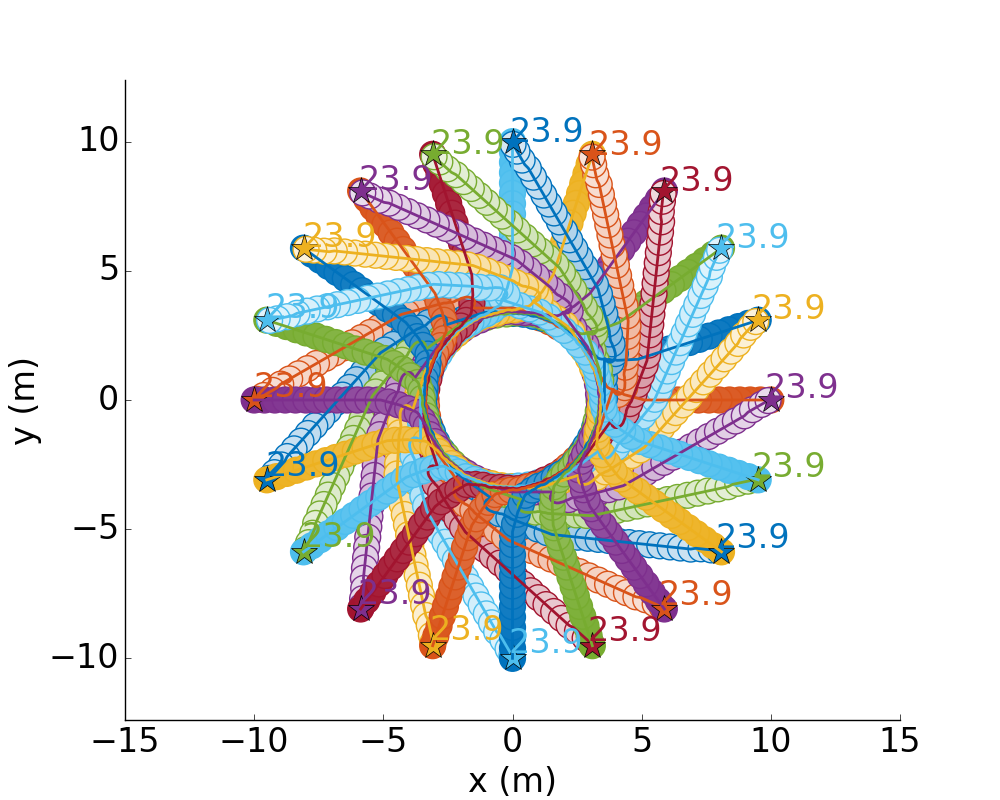
GA3C-CADRL full test suite results (includes plot and stats for each of the 500 test cases for each number of agents, for the CADRL and two versions of GA3C-CADRL): 1.1GB zip file
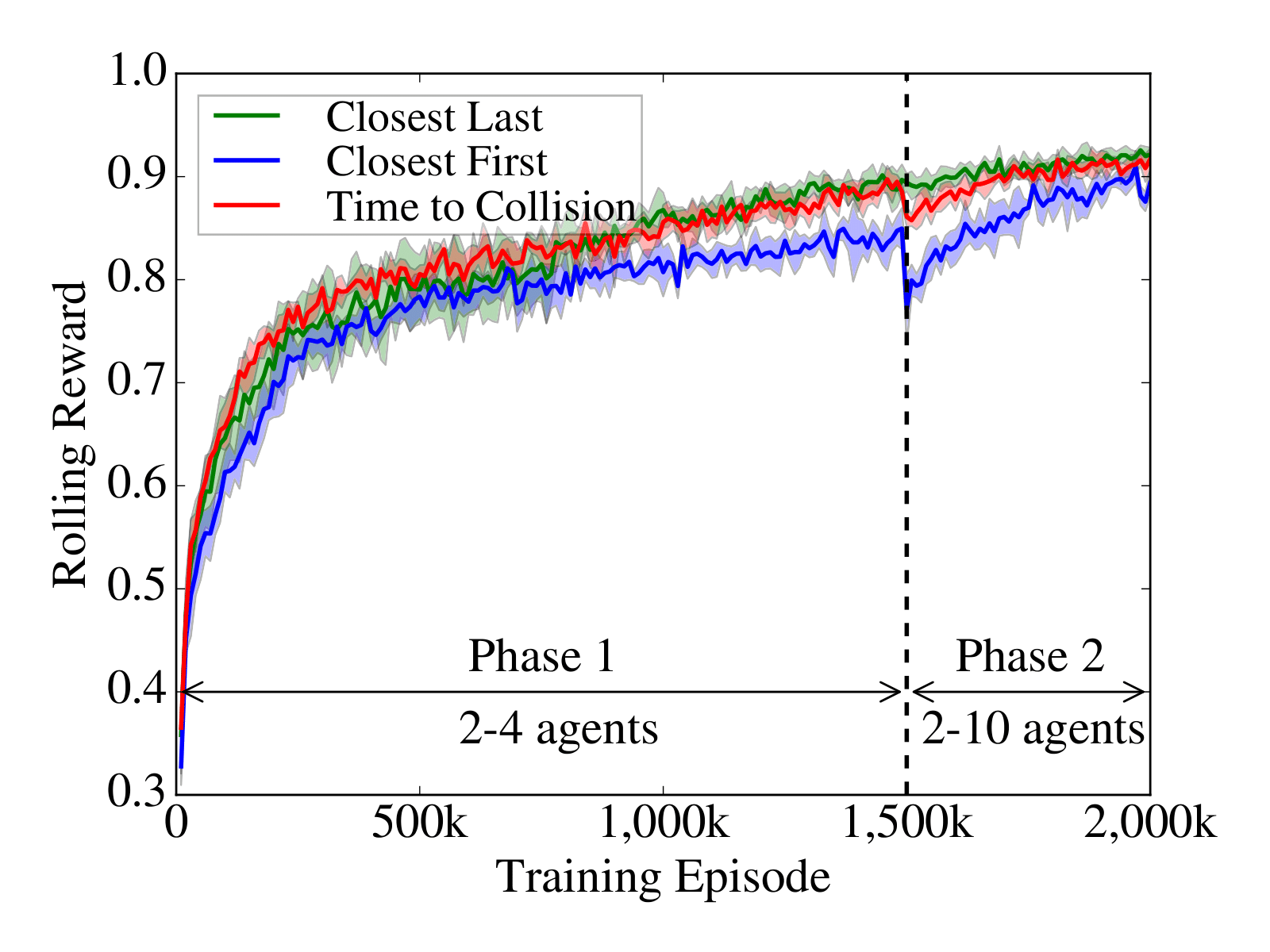
GA3C-CADRL training runs: wandb project